Foto: Science Robotics
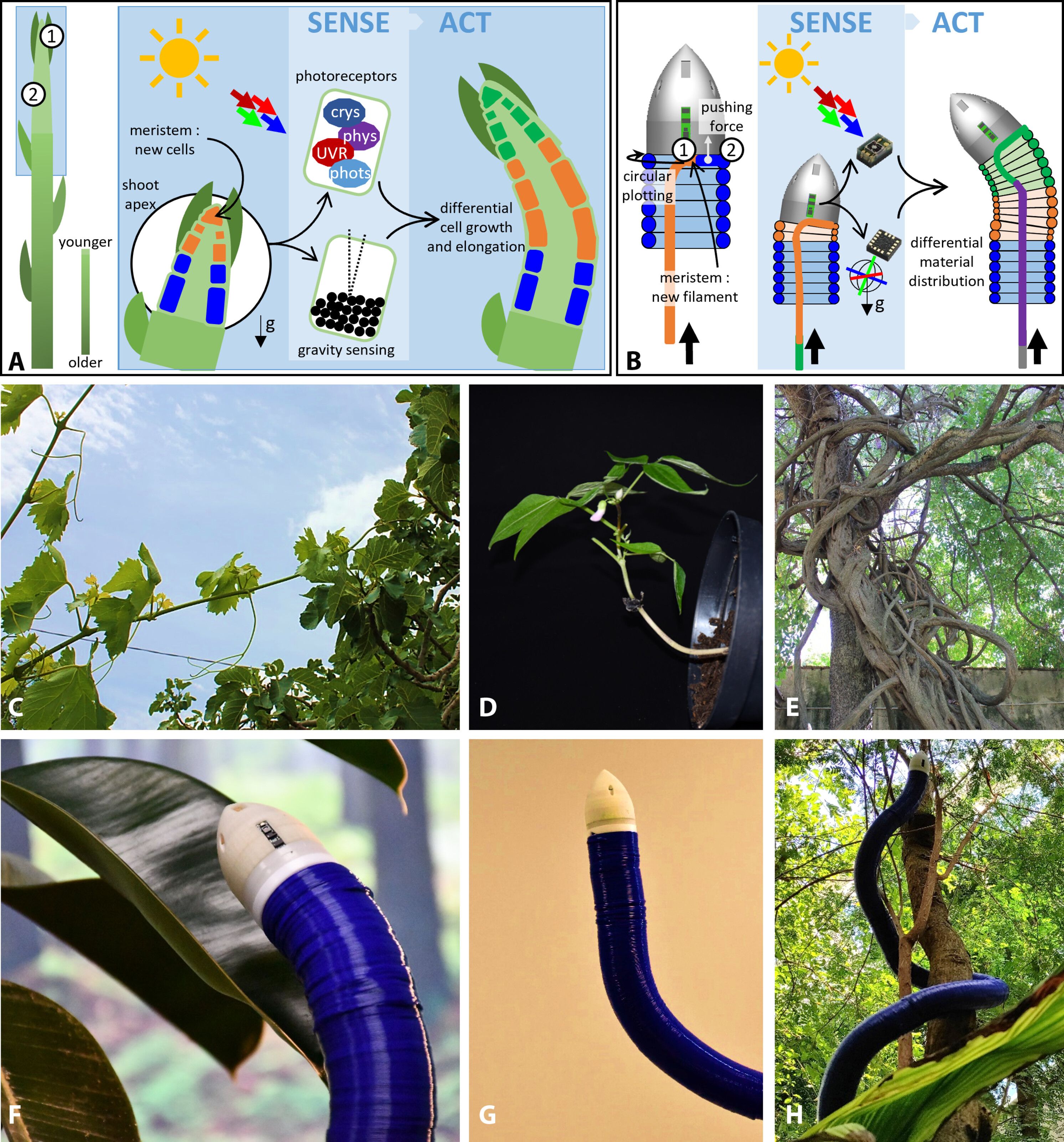
FiloBot memiliki tubuh silinder yang terbuat dari filamen plastik melingkar dan dapat tumbuh dipandu oleh cahaya dan gravitasi seperti halnya tanaman. FiloBot juga dapat berlabuh pada penyangga dengan melilit struktur untuk memanjat secara vertikal. Tim peneliti belum mengetahui secara pasti kegunaan robot tersebut, namun mereka berharap FiloBot dapat digunakan untuk mengumpulkan data di tempat-tempat yang sulit dijangkau manusia, seperti puncak pohon.
Dilansir dari New Scientist edisi (18/01/2024) robot mirip tanaman merambat bukanlah hal baru, tetapi sering kali mereka dirancang hanya dengan mengandalkan satu indera untuk tumbuh, seperti panas atau cahaya, yang berarti mereka tidak bekerja dengan baik di beberapa lingkungan seperti di tempat lain.
Emanuela Del Dottore di Institut Teknologi Italia dan rekan-rekannya telah mengembangkan versi baru, yang disebut FiloBot. Penamaan ini terinspirasi dari tanaman panjat bernama FiloBot. Robot in dapat menggunakan cahaya, bayangan, atau gravitasi sebagai panduan. Ia tumbuh dengan melilitkan filamen plastik menjadi bentuk silinder, menambahkan lapisan baru pada tubuhnya tepat di belakang kepala yang berisi sensor.
“Robot kami memiliki mikrokontroler tertanam yang dapat memproses berbagai rangsangan dan mengarahkan pertumbuhan pada lokasi yang tepat, ujungnya, memastikan struktur tubuh tetap terjaga,” kata Emanuela.
Robot bereaksi terhadap kendala dan rangsangan lingkungan melalui kombinasi adaptasi morfologi pasif dan kontrol berbasis perilaku yang terinspirasi secara biologis yang menggunakan metode medan vektor untuk memperkirakan arah pertumbuhan yang disebabkan oleh multi tropisme di kepala apical.
“Kontrol yang baik terhadap arah ujung ini berarti robot dapat dengan mudah menavigasi medan yang asing, dengan melingkari dirinya di sekitar pepohonan atau menggunakan bagian dedaunan yang teduh sebagai penunjuk arah,” ujar Emanuela.
FiloBot tumbuh sekitar 7 milimeter per menit. Meskipun lebih lambat dibandingkan robot konvensional, kemajuan yang lambat ini berarti tidak mengganggu lingkungan alam yang sensitif. Untuk mencapai hasil ini, tim melakukan desain ulang robot pertumbuhan yang dikembangkan sebelumnya, mengurangi dimensi dan meningkatkan radius tekukan minimumnya. Strategi pengendalian pengendapan material juga diterapkan untuk mengakomodasi desain dan memungkinkan kemudi sistem.
Robot dapat melewati ruang kosong, berlabuh pada penyangga vertikal dengan cara melilit, dan menavigasi lingkungan melalui kontrol berbasis perilaku yang terinspirasi oleh perilaku tropisme tumbuhan.