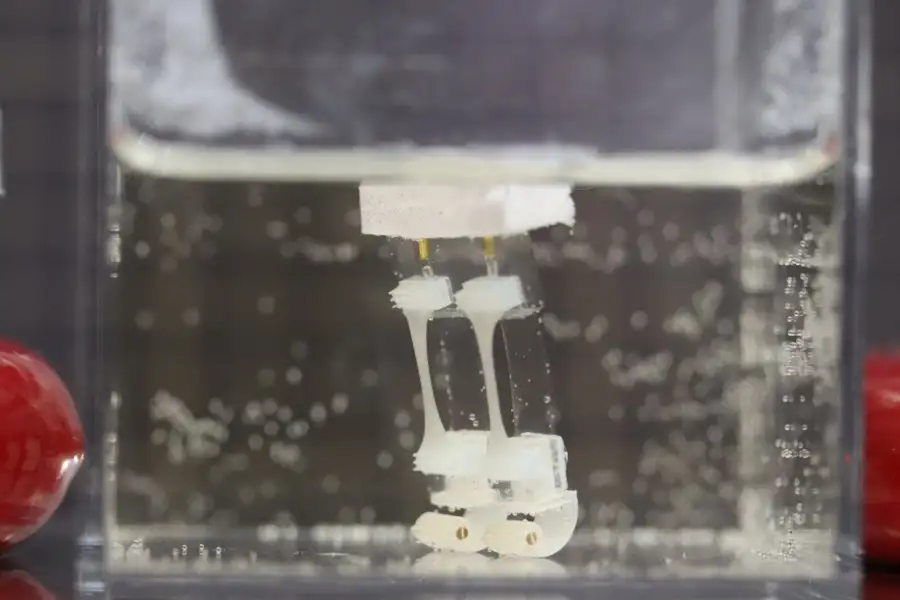
NewScienctist/ Kelompok penelitian Shoji Takeuchi, Universitas Tokyo (CC-BY SA) Robot biohibrid berisi jaringan otot, berdiri di dalam tangki berisi air
Jakarta, tvrijakartanews - Robot biohibrid kecil bergerak dengan mengkontraksikan jaringan otot yang dikembangkan di laboratorium pada kakinya, namun ia membutuhkan bantuan untuk berdiri di dalam tangki air dan kecepatannya hanya 5,4 milimeter per menit.
Meskipun robot biohibrid yang dapat merangkak dan berenang telah dibuat sebelumnya dengan otot yang dikembangkan di laboratorium, ini adalah robot bipedal pertama yang dapat berputar dan berbelok tajam. Hal ini dilakukan dengan mengalirkan listrik ke salah satu kakinya untuk membuat otot berkontraksi, sementara kaki lainnya tetap berlabuh. Otot bertindak sebagai aktuator biologis, komponen yang mengubah energi listrik menjadi kekuatan mekanik.
Dilansir dari NewScientist edisi (26/01/2024) saat ini robot yang tingginya hanya 3 sentimeter tersebut belum mampu menopang dirinya di udara dan memiliki pelampung busa untuk membantunya berdiri di dalam tangki air. Otot-otot tersebut tumbuh dari sel tikus di laboratorium.
Shoji Takeuchi di Universitas Tokyo, Jepang, yang merupakan anggota tim peneliti mengatakan robot ini masih penelitian dasar.
“Kami belum berada pada tahap di mana robot ini dapat digunakan di mana saja. Untuk membuatnya berhasil di udara, masih banyak masalah terkait yang perlu diselesaikan, namun kami yakin hal ini dapat dilakukan dengan meningkatkan kekuatan otot,” kata Shoji.
Robot ini masih sangat lambat menurut standar manusia, hanya bergerak 5,4 millimeter per menit. Dibutuhkan waktu lebih dari satu menit untuk berputar 90 derajat, dengan rangsangan listrik setiap 5 detik. Takeuchi berharap timnya dapat membuat robot lebih cepat dengan mengoptimalkan pola rangsangan listrik dan menyempurnakan desain.
“Langkah selanjutnya dari robot biohibrid adalah mengembangkan versi dengan sendi dan jaringan otot tambahan untuk kemampuan berjalan yang lebih canggih, otot yang tebal juga perlu dibangun untuk meningkatkan kekuatan,” lanjutnya.
Untuk berjalan di udara dibandingkan di air, robot juga membutuhkan sistem pasokan nutrisi untuk menjaga jaringan otot tetap hidup.
Sementara itu, Victoria Webster-Wood dari Carnegie Mellon University di Pennsylvania mengatakan penelitian ini merupakan bukti konsep robot biohibrid yang menarik.
“Robot biohibrid jenis ini adalah alat yang berguna untuk mempelajari rekayasa jaringan otot dan menyelidiki cara mengendalikan aktuator biologis. Seiring dengan kemajuan kekuatan dan kemampuan kontrol melalui jenis penelitian ilmiah ini, kemampuan untuk menerapkan aktuator ini pada robot yang lebih kompleks akan meningkat,” kata Webster-Wood.